1 介绍
1.1 定义
- 表示“多对多”的关系
- 包含:
- 一组顶点:通常用V(Vertex)表示顶点集合
- 一组边:通常用E(Edge)表示边的集合:无向边(v,w)∈E,其中v,w∈V;有向边<v,w>表示从v到w的边;不考虑重边和自会路
1.2 常见术语
- 无向图:所有的边都没有方向的图
- 有向图:边是有方向的
- 网络:边带权重的图
- 度:从顶点发出的边数为“出度”,指向该点的边数为“入度”
- 连通:如果从V到W存在一条(无向)路径,则称V和W是连通的
- 路径:V到W的路径是一系列顶点{V,v1,v2,...,vn,W}的集合,其中任一对相邻的顶点间都有图的边。路径的长度是路径中的边数(如果带权,则是所有边的权重和)。如果V到W之间的所有顶点都不同,则称为简单路径
- 回路:起点等于终点的路径
- 连通图:图中任意两顶点均连通
- 连通分量:无向图的极大连通子图,极大表示:①顶点数极大,再加上一个顶点就不连通了。②边数极大,包含子图中的所有顶点相连的所有边。
- 强连通:有向图中顶点V和W之间存在双向路径,则称V和W是强连通的
- 强连通图:有向图中任意两个顶点均强连通
- 强连通分量:有向图中的极大强连通子图
1.3 图的表示
1.3.1 邻接矩阵
- 邻接矩阵G[N][N]——N个顶点从0到N-1编号
G[i][j]={10若<vi,vj>是G中的边否则
- 邻接矩阵的特点:
- 直观、简单、好理解
- 方便检查任意一对顶点间是否存在边
- 方便找任一顶点的所有“邻接点”(有边直接相连的顶点)
- 方便计算任一顶点的“度”
- 邻接矩阵的缺点:
- 浪费空间————存稀疏图(点很多而边很少)有大量无效元素,但存稠密图(特别是完全图)挺合算
- 浪费时间————统计稀疏图中一共有多少条边
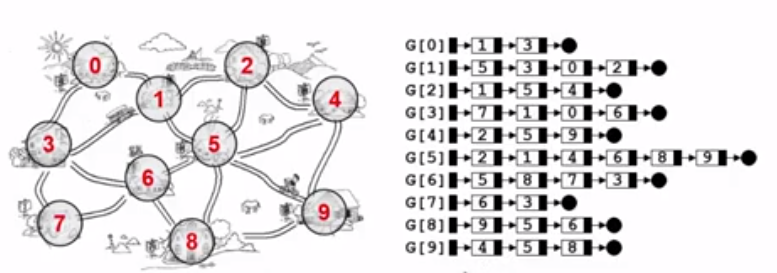
1.3.2 邻接表
- 邻接表:G[N]为指针数组,数组的每个元素存放一行链表的头结点,只存非0元素
- 邻接表的特点:
- 方便找任一顶点中的所有“邻接点”
- 节约稀疏图的空间(需要N个头指针+2E个结点,E为边数)
- 方便计算无向图的度和有向图的出度,但不方便计算有向图的入度
- 邻接表的缺点
- 本身多了一个指针域,表示网络来说,多了一个权重域,所以仅适用于表达稀疏图
- 不方便计算有向图的入度(除非再构造一个“逆邻接表”)
1.4 图的遍历
1.4.1 深度优先遍历(Depth Fisrt Search,DFS)
/* 伪代码 */
void DFS(Vertex V){
visited[V] = true;
for(V的每个邻接点W)
if(!visited[W])
DFS(W);
}
- 用邻接表存储图,时间复杂度为O(N+E) (N为结点数,E为边数)
- 用邻接矩阵存储图,时间复杂度为O(N2)
1.4.2 广度优先遍历(Breadth Fisrt Search,BFS)
/* 伪代码 */
void BFS(Vertex V){
visited[V] = true;
Enqueue(V, Q);
while(!IsEmpty(Q)){
V = Dequeue(Q);
for(V的每个邻接点W){
if(!visited[W]){
visited[W] = true;
Enqueue(V, Q);
}
}
}
}
- 用邻接表存储图,时间复杂度为O(N+E) (N为结点数,E为边数)
- 用邻接矩阵存储图,时间复杂度为O(N2)
2 最短路径
2.1 定义
- 最短路径:在网络中,求两个顶点间的所有路径中,边权值之和最小的那条路径就是这两点间的最短路径。
- 源点:求最短路径时的起点称之为源点
- 终点:求最短路径时的终点称之为终点
- 单源最短路径问题:从某固定源点出发,求其到所有其他顶点的最短路径
- 多源最短路径问题:求任意两顶点间的最短路径
2.2 方法
2.2.1 无权图的单源最短路算法
// T = O(|V|+|E|)
void Unweighted( Vertex S ){
Enqueue(S, Q);
while(!IsEmpty(Q)){
V = Dequeue(Q);
for(V的每个邻接点W){
if(dist[W]==-1){
dist[W] = dist[V]+1;
path[W] = V;
Enqueue(W, Q);
}
}
}
}
2.2.2 有权图的单源最短路算法——Dijkstra算法
- 令S={源点s+已经确定了最短路径的顶点vi}
- 对任一未收录的顶点v,定义dist[V]为s到v的最短路径长度,但该路径仅经过S中的顶点。即路径{s→(vi∈S)→v}的最小长度
- 真正的最短路径只经过S中的顶点
- 每次从未收录的顶点中选一个dist最小的收录(贪心):如果采用遍历的方式获得dist最小,则T=O(∣V∣2+∣E∣);如果采用最小堆的方法建立和获得最小dist,则T=O(∣V∣log(∣V∣)+∣E∣log(∣V∣))=O(∣E∣log(∣V∣))
- 增加一个v到S,可能影响另外一个w的dist值
void Dijkstra(Vertex S){
while(1){
V = 未收录顶点中dist最小者;
if(V不存在)
break;
collected[V] = true;
for(V的每个邻接点W){
if(collected[W] = false){
if(dist[V]+E<v,w> < dist[W]){
dist[W] = dist[V]+E<v,w>;
path[W] = V;
}
}
}
}
}
2.2.3 多源最短路算法——Floyd算法
- Dk[i][j]=路径{i→{l≤k}→j}
- D0,D1,...,D∣v∣−1[i][j]即给出了从0到|v|-1逐次加入顶点后i到j的最短距离矩阵
- D−1应为带权的邻接矩阵,对角线为0
- 当Dk−1已经完成,递推到Dk时:如果新加入的顶点k不影响Dk−1各个顶点彼此间最短路径,则不需要更新;反之,如果影响了,那么影响后的最短路径必然由两段最短路径组成,即Dk[i][j]=Dk−1[i][k]+Dk−1[k][j]
void Floyd(){
for(i=0;i<N;i++){
for(j=0;j<n;j++){
D[i][j] = G[i][j];
path[i][j] = -1;
}
}
for(k=0;k<N;k++)
for(i=0;i<N;i++){
for(j=0;j<n;j++)
if(D[i][k]+D[k][j]<D[i][j]){
D[i][j] = D[i][k]+D[k][j];
path[i][j] = k;
}
}
}
3 最小生成树
3.1 定义
- 是一棵无回路的树,|V|个顶点一定有|V|-1条边
- 包含了全部的顶点,|V|-1条边都在路里
- |V|-1条边的权重和最小
3.2 方法
3.2.1 Prim算法
void Prim(Vertex s){
MST = {s};
while(1){
v = 未收录顶点中dist最小的;
if(这样的V不存在)
break;
将V收录进MST: dist[v] = 0;
for(v的每个邻接点W){
if(W未被收录)
if(E<v,w> < dist[w]){
dist[W] = E<v,w>;
}
}
}
}
3.2.2 Kruskal算法——将森林合并成树
- 思路:从图中每次找到边权值最小的边,如果该边不构成回路,则加入到生成树集合;如果构成,删除掉该边
- T=O(∣E∣log(∣E∣))
void Kruskal(Vertex s){
MST = {};
while(MST中的边不到|V|-1条&&E中还有边){
e=E中权重最小的边; /* 最小堆 */
Delete(E, e);
if(e加入到MST没有构成最小回路) /* 并查集 */
e 加入到 MST;
}
if( MST中的边不到|V|-1条 )
Error("生成树不存在")
}